2





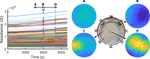
Tactile Perception in Hydrogel-based Robotic Skins using Data-Driven Electrical Impedance Tomography
A model-free method for the reconstruction of deformations in a hydrogel skin using electrical impedance tomography. The method can be used for damage detection, environmental monitoring, and multi-touch recognition.