Tactile Perception in Hydrogel-based Robotic Skins using Data-Driven Electrical Impedance Tomography
Abstract
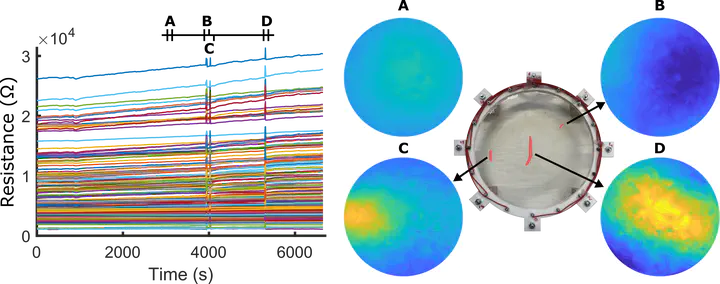
Combining functional soft materials with electrical impedance tomography is a promising method for developing continuum sensorized soft robotic skins with high resolutions. However, reconstructing the tactile stimuli from surface electrode measurements is a challenging ill-posed modelling problem, with FEM and analytic models facing a reality gap. To counter this, we propose and demonstrate a model-free superposition method which uses small amounts of real-world data to develop deformation maps of a soft robotic skin made from a self-healing ionically conductive hydrogel, the properties of which are affected by temperature, humidity, and damage. We demonstrate how this method outperforms a traditional neural network for small datasets, obtaining an average resolution of 12.1 mm over a 170 mm circular skin. Additionally, we explore how this resolution varies over a series of 15,000 consecutive presses, during which damages are continuously propagated. Finally, we demonstrate applications for functional robotic skins - damage detection/localization, environmental monitoring, and multi-touch recognition - all using the same sensing material.