Dr David Hardman
Dr David Hardman
Home
Publications
Posts
Outreach
Contact
CV
Light
Dark
Automatic
1
In-Situ Classification of Soil Types Exploiting Electrical Impedance Tomography with a Robotic Actuating Probe
Xiaoxian Xu
,
Catherine Merchant
,
Michael Ishida
,
David Hardman
,
Fumiya Iida
Cite
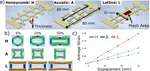
Design and Modelling of Electrical Impedance Tomography-based 3D-Printed Patterned Soft Tactile Skins
The ability to estimate contact information is becoming increasingly relevant for robotic applications. Consequently, there is a …
Yunqi Huang
,
David Hardman
,
Christopher Bascucci
,
Frank Clemens
,
Thomas George Thuruthel
PDF
Cite
Video
DOI
Controllable Wound Closure in Artificial Skins using Dual-Layer Bioinspired Mechanism
Punctures and surface damage can be catastrophic for soft robotic systems. Inspired by the self-sealing deformations of plants and the …
David Hardman
,
Fumiya Iida
PDF
Cite
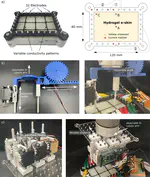
Multi-touch Recognition of Hydrogel-based E-skins using Real-world EIT Datasets
We present a soft gelatin-based hydrogel e-skin capable of detecting up to six simultaneous tactile stimuli, using electrical impedance …
Lorcan Nicholls
,
David Hardman
,
Fumiya Iida
PDF
Cite
How to Fool Your Robot - Designing Exploitable Sensory Systems
Based on real-world interactions in our lives and in the lives of our ancestors, humans have developed a multitude of psychological, …
David Hardman
,
Fumiya Iida
PDF
Cite
DOI
Composite Stretchable Sensors for the Detection of Asymmetric Deformations in a Soft Manipulator
As the task-complexities demanded of soft robots continue to increase, so too does the need for soft sensorized skins which can provide …
David Hardman
,
Ryman Hashem
,
Fumiya Iida
PDF
Cite
Video
Variable Response Characteristics of a Soft Sensorized Hydrogel using Mesoscale Cellular Structures
Sensorized hydrogels are attracting tremendous interest in the manufacture of flexible strain sensors due to their impressive responses …
Naoki Tano
,
Ryman Hashem
,
David Hardman
,
Fumiya Iida
PDF
Cite
Design and Development of a Hydrogel-based Soft Sensor for Multi-Axis Force Control
As soft robotic systems become increasingly complex, there is a need to develop sensory systems which can provide rich state …
Yichen Cai
,
David Hardman
,
Fumiya Iida
,
Thomas George Thuruthel
Cite
Code
Towards Growing Robots - A Piecewise Morphology-Controller Co-adaptation Strategy for Legged Locomotion
Control of robots has largely been based on the assumption of a fixed morphology. Accordingly, robot designs have been stationary in …
David Hardman
,
Thomas George Thuruthel
,
Fumiya Iida
PDF
Cite
Video
Cite
×