Abstract
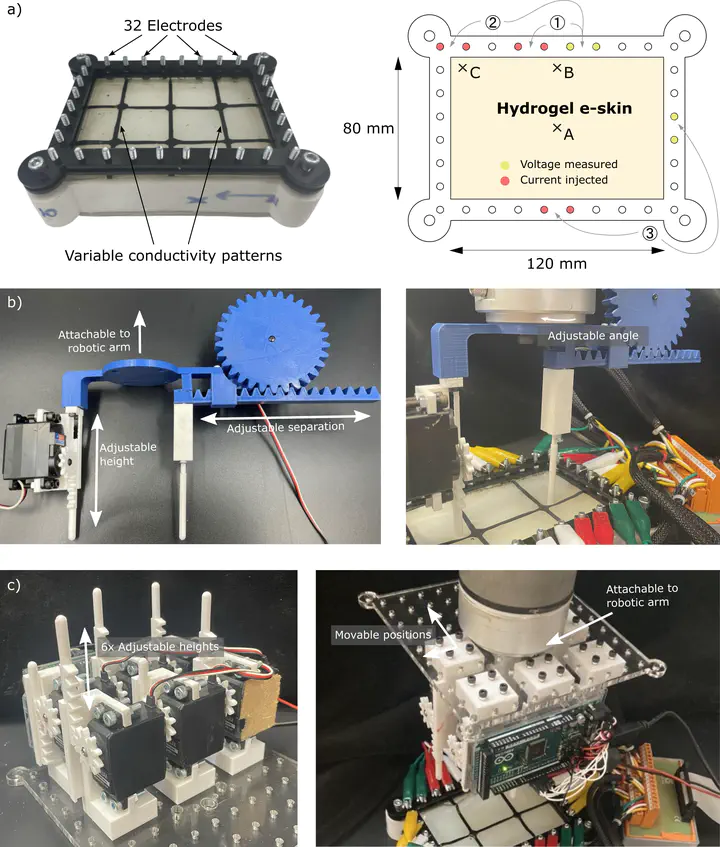
We present a soft gelatin-based hydrogel e-skin capable of detecting up to six simultaneous tactile stimuli, using electrical impedance tomography (EIT) measurements and convolutional neural networks. Our networks are trained on only real-world data, for which we present two custom data-collecting end-effectors. These allow multi-touch responses to be measured quickly and autonomously (up to 8 seconds per datapoint), giving datasets more than 10x larger than those existing in the literature. To demonstrate the benefits of this approach, we train a non-homogeneous skin to predict `macro-braille’ patterns in a 3x2 grid, achieving a 89% classification accuracy.
Type
Publication
In 2024 International Conference on Soft Robotics