Biography
I’m a Henslow Junior Research Fellow (JRF) in robotics at Fitzwilliam College, Cambridge. Most of my days are spent building tactile sensors and artificial skins in Cambridge’s Bio-Inspired Robotics Laboratory, where I am an affiliated lecturer and hold an EPSRC Doctoral Prize Fellowship.
During my PhD I also worked as a visiting researcher in EPFL’s CREATE Lab, and in TTP’s surgical team.
In my spare time I enjoy playing badminton and tennis, and I’m a member of the world-famous Magic Circle.
Interests
- Mechatronics & soft robotics
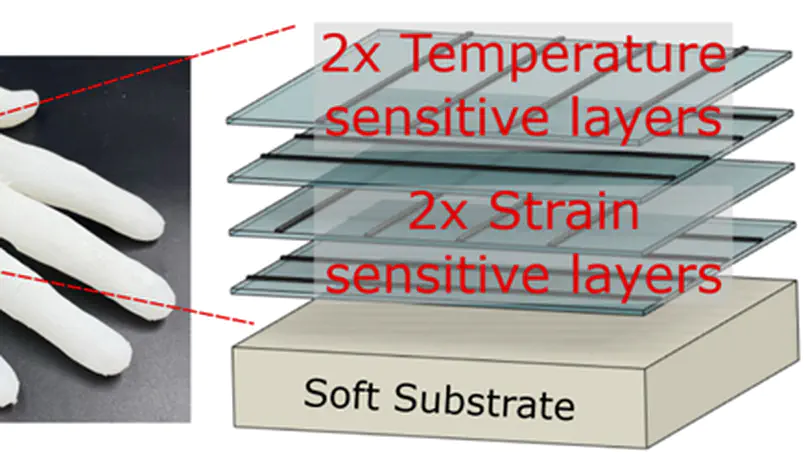
- Tactile perception & artificial skins
- Medical automation
- Additive manufacturing
- Large-scale experimentation
Education
-
PhD in Bio-Inspired Robotics, 2020-2024
University of Cambridge
-
MEng in Mechanics, Materials and Design, 2019-2020
University of Cambridge
-
BA in Engineering, 2016-2019
University of Cambridge
Experience
Junior Research Fellow
EPSRC Doctoral Prize Fellow
Visiting Researcher
PhD Student
Consultant (Health Tech)
Teaching Assistant
Undergraduate Researcher
Engineering Intern
Tutor
Featured Publications


Publications
(2026).
Economy of Touch - Task-Driven Information Selection in Tactile EIT-based Robotic Sensing.
In Adv. Intell. Syst..
(2026).
Touch with Insight - Physics-Aware Data-Driven Learning for EIT-Based Tactile Sensing.
In ICRA 2026 (accepted).
(2026).
The Language of Deformation - Semantic Failure Analysis as a Prerequisite for Dexterous Manipulation of Deformable Objects.
In ERF 2026 (accepted).
(2025).
In-Situ Classification of Soil Types Exploiting Electrical Impedance Tomography with a Robotic Actuating Probe.
In IROS 2025.
(2025).
Enhancing Electrical Impedance Based Deformation Sensing with Dielectric Current Guide.
In Adv. Electron. Mater..
Recent Posts





Contact
- dsh46@cam.ac.uk
- 01223 332600
- Bio-Inspired Robotics Lab, Department of Engineering, Trumpington Street, Cambridge, CB2 1PZ
- Message me