Abstract
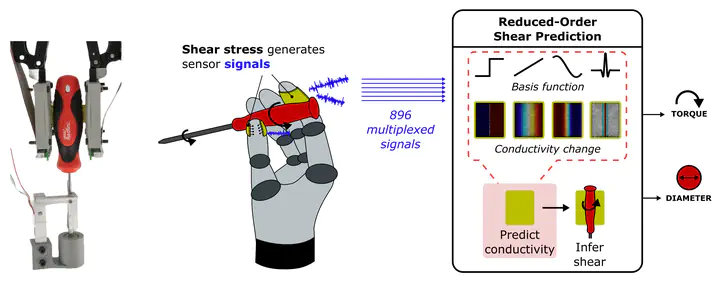
Much as the information generated by our fingertips is used for fine-scale grasping and manipulation, closed-loop dexterous robotic manipulation requires rich tactile information to be generated by artificial fingertip sensors. In particular, fingertip shear sensing dominates modalities such as twisting, dragging, and slipping, but there is limited research exploring soft shear predictions from an increasingly popular single-material tactile technology - electrical impedance tomography (EIT). Here, we focus on the twisting of a screwdriver as a representative shear-based task in which the signals generated by EIT hardware can be analyzed. Since EIT’s analytical reconstructions are based upon conductivity distributions, we propose and investigate five reduced-order models which relate shear-based screwdriver twisting to the conductivity maps of a robot’s single-material sensorized fingertips. We show how the physical basis of our reduced-order approach means that insights can be deduced from noisy signals during the twisting tasks, with respective torque and diameter correlations of 0.96 and 0.97 to our reduced-order parameters. Additionally, unlike traditional reconstruction techniques, all necessary FEM model signals can be precalculated with our approach, promising a route towards future high-speed closed-loop implementations.